Your comments
Salut Lionel,
I haven't had any problems with the encoder yet therefore I have little experience with it, however I will check the background this week to figure out how it works. In general I would expect signals on all 5 input ports (Hall A/B/C and ENC A/B).
Regarding the IGBT block, I don't have a layout diagram but it is fairly easy to find the respective optocouplers, they are next to the IGBT control pins on the PCB. On the other hand I have the circuit diagrams for the MC, please drop me an (email : vectrixshare@gmail.com) regarding those.
No worries for the patience, we are here to help each other :)
Bonjour Sylvain,
Yes I have the complete file, please send an email to the following address : vectrixshare@gmail.com
No probs at all - please find the page showing the relevant part of the MC. It is a fairly simple design with 3-3 opto gates driving the positive and negative sides of the IGBT for the 3 phases (U,V,W). B+ stands for the positive voltage of the battery.
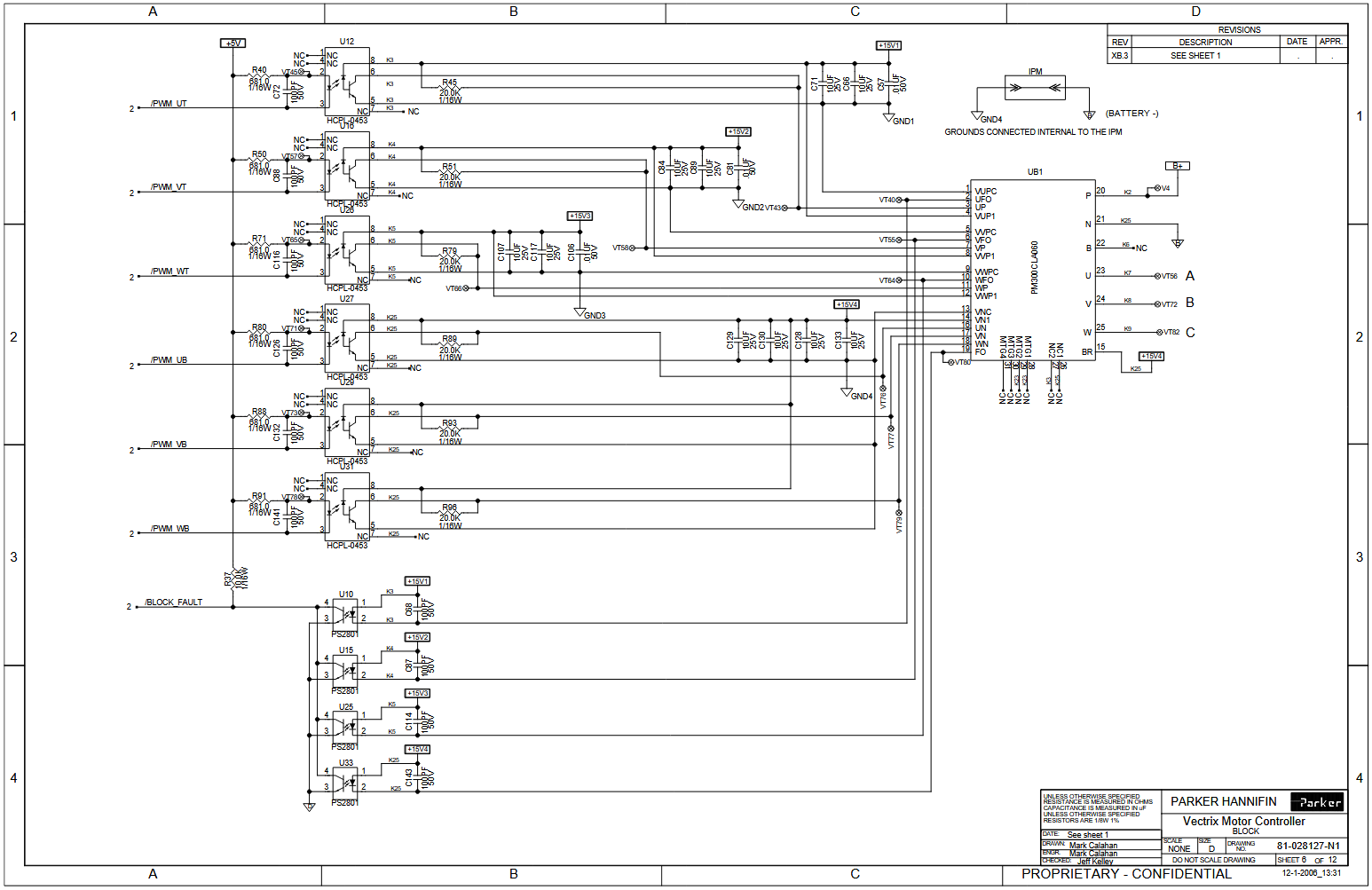
As shown in theory the IGBT fault should be detected (and the respective error displayed in the application and on the dashboard) but as far as I know this does not happen in all the cases. It is basically a logical OR function realized with the 4 gates shown.
Forgot to respond to your last remark. Feel free to share the pictures of the signals here in the blog - if something would not be clear we could agree to have a zoom call later as well.
Bonjour Lionel,
Mon français est loin d'être parfait encore, je vais donc continuer à utiliser l'anglais pour notre conversation. Apparently there are some promising news for the fuse of the supercapacitor and also with the cell voltages detection (I guess you've replaced the firmware on the MC).
Concerning the MC itself, yes there is a calibration function in the diag application under the Encoder tab. You could try to run the calibration (with the rear wheel lifted of course). Unfortunately based on the symptoms you've described - more precisely asymmetric behaviour between the 3 phrases - there is a chance it won't help. One of the weak points of these motor controllers is the IGBT module that drives the motor. While I've never had problems with those in my two scooters, this happens sometimes. I have a few broken MCs from other people with missing modules.
If it is defective the options are
(1) buying a used MC from internet, obviously there is no guarantee it will have a working IGBT
(2) replace the module (Mitsubishi PM300CLA060), the challenge is there is a row of control pins to be carefully desoldered
(3) fixing the IGBT module itself, the bad news is it is filled with epoxy
If you prefer to check the problem in more detail you can run additional tests with the oscilloscope including the input signals of the IGBT (https://www.alldatasheet.com/datasheet-pdf/pdf/161781/MITSUBISHI/PM300CLA060.html).
While I've never seen a defective motor it may be worth to check the resistance between the 3 coils on the motor itself.
Sure, glad you are making progress. Pas de neige ici à Antibes :)
I'd recommend to use the MCR2042-4.hex. My assumption is the Framuga MC firmware is not interpreting the CAN messages coming from the charger properly and limits the power as the result.
In general the MC with the stock firmware is capable to work in case there are proper cell voltage values coming from the BMS but also if these values are completely missing. On the other hand operation is disrupted in case there are forbidden values on the bus namely cell overvoltage or undervoltage. Could you check these values in diag mode : red kill switch on > left brake lever pulled once > red kill switch off - and the respective values displayed on the small LCD on the dashboard. Values like "0" and "nots" indicate wrong data on the bus.
Salut Lionel,
Looks good, this is the last BMS version Vectrix has offered and should be fully compatible with the CAN requirements.
In terms of the firmware versions my question was not precise enough, what I've meant the complete list of all hex files you have available to use (for example if you have the actual MCR2042-1.hex which is shown on your screenshot).
The defective fuse is not related to your problem, they are simply protecting the Murata supercapacitors and sometimes they fail indeed. Since this exact type is not in production anymore, we tend to replace them with equivalent SMD fuses.
Hi,
There might be multible issues based on your description. The first detail that stands out is the firmware on the motor controller (MC). The FRA firmwares are written by Framuga to support his BMS in terms of the communication between the various components - in other words he has written dedicated versions to allow the charger, the motor controller and the ICM to work seamlessly with his hardware.
Accordingly you may need to replace the firmware on the MC to match your stock BMS. Worth noting the MC FW change requires particular attention since any disruption during the process may erase the controller and recovery requires special tools and knowledge (I am able to restore it). The best practice is to completely disconnect the charger and the BMS from the CAN bus for this step.
If you could share a picture of your BMS board(s) and the list of FW versions you have currently.
Customer support service by UserEcho
Bonjour Lionel,
Great, thank you. We could use emails indeed for exchanging files which may not be of interest of the wider community indeed.
Meanwhile I've checked the encoder and I see conflicting statements if Hall sensors are in use or the angular detection only relies on the optical sensor. Some claim it is not in use and I don't see Hall elements on the pictures of the board either (I am not in the position here in Antibes to check it myself). On the other hand I see references to the Hall functionality in the pre-production versions of the MC firmware.
https://i.imgur.com/AXDbSoO.png